SIP-EM3
鉄板皿を含む様々な食器類用のロボットハンド

[1] 開発目的
課題
下膳された食器類の洗浄過程において食器の洗浄自体は食洗器により自動化が進んでいるが,詰め込む作業は自動化が難しい。狭いレストラン等にもおけるように,小型で鉄板皿等を含む様々な食器類を把持可能なロボットハンドが必要となる。
解決方法
低自由度ながら様々な食器類に適した把持方法が実現可能な機構を開発する。
[2] 構造
- ・受動機構を内蔵した複数の把持点を持つ回転型のロボット指を持つ。
- ・先端に摘み把持用の爪をもつスライド指機構を持つ。
- ・これらの運動を組み合わせることで,精密把持,握力把持,重量皿の把持を実現する。
- ・機構は3Dプリンタと弾性体の組み合わせによって構成されている。
[3] 結果
- ・精密把持動作により,スプーン,平皿,ボウル等の把持が可能となった。
- ・握力把持により,コップ類を中心とした円筒状の物体の把持が可能となった。
- ・重量皿の把持により,ステーキ用の鉄板皿等の把持が可能となった。
- ・鉄板皿の認識を行い,重なった皿等をバットに詰め込むことが可能となった。
[4] 参考文献
- ・荒木博揚, 青谷拓海,小澤隆太“食器把持ロボットハンドを用いた鉄板皿の運搬作業の自動化”,SI2022, 2022年12月,
- ・荒木博揚, 長谷川晃國,小澤隆太, “食器把持ロボットハンドを用いた鉄板皿の把持計画”, ロボティクス・メカトロニクス講演会2022,2022年6月
- ・山本海斗, 小澤隆太, “平面受動グリッパを備えた食器用ロボットハンドの開発”, 日本機械学会ロボティクス・メカトロニクス講演会2021, 2021年6月
- ・山本海斗, 小澤隆太, “鉄板皿把持用ロボットハンドの開発”, 日本機械学会ロボティクス・メカトロニクス講演会2020, 2020年5月
[5] 担当者
明治大学 小澤隆太食器用ロボットハンド
食器用ロボットハンドの把持実験
食器類の基本把持機能(3倍速)
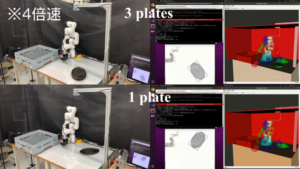
鉄板皿の認識と把持