SIP-PI1
SIP-PI1
受動変形柔軟ハンド
[1] 開発目的
課題
軟弱食品のようにロボットハンドでの把持時に損傷しやすいワークの場合は,
ハンド表面での接触負荷をできるだけ低くしながら把持ハンドリングする必要がある.
解決方法
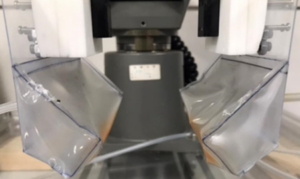
ハンド表面に流体を保持する柔軟袋を装着し,これを用いてグリッパを構成する.
柔軟ワーク把持時には,対象物に倣うように変形することで接触面積が受動的に
拡大するため低負荷把持を実現できる.同時にハンド表面袋内圧を測定・制御する
ことでワークに対する接触荷重と接線荷重の制限を保証できる.
[2] 構造と制御
平行グリッパや三つ爪グリッパ表面に薄いシリコンゴムもしくはポリウレタン
ゴム製の柔軟袋を装着.この内圧を一定値に制御しながら,グリッパ把持動作を
おこなう.グリッパ表面袋は規定接触圧を維持し,接触面積拡大しながら受動変
形する.柔軟袋内圧は,接触ヤング率でワークヤング率の1/4程度の値に設定する.
[3] 結果
提案ハンドの超低負荷での把持により,エッジを有する絹ごし豆腐およびゼリーの
安定した把持ハンドリング・ピックアンドプレース作業を実現できた.柔軟食品の
ヤング率で数100~数1000Pa程度の軟弱食品が把持可能である.
[4] 関連資料
関連特許:特許第5762758号,ロボットハンド装置
[5] 担当者
九州大学 山本元司 yama@mech.Kyushu-u.ac.jp
 |
 |
 |
|
受動変形柔軟ハンド |
受動変形柔軟ハンド |
受動変形柔軟ハンド |
ゼリーのピックアンドプレース
絹ごし豆腐のピックアンドプレース
明太子のピックアンドプレース