SIP-PE4
SIP-PE4
飛び移り座屈を利用した包み込みグリッパ
[1]開発目的
課題
接触力の集中した箇所から腐食が始まるような繊細な果物を傷つけずに把持することは困難である.様々なタイプのソフトグリッパが存在するが,それらは対象に把持部を押し付けることによる変形によってなじみ把持を実現している.結果として把持対象への負荷が増大するだけではなく,対象の形状によっては把持部の接触面積を大きく保つことができない場合がある.
解決方法
飛び移り座屈を利用した開閉機構によって対象物の全周囲に爪を配置し,接触力を分散する.把持対象と似た形状の把持部によって把持を行うことで,接触面積を最大化する.飛び移り座屈を利用した開閉機構を採用することで,複雑な形状の把持部をシンプルな機構で動作させることができる.造形は型を用いた一体成型が可能で部品点数が非常に少ない.
[2]構造
・把持対象と近い形状の膜を分割した把持部と,球殻状のアクチュエータ部によって構成されている.
・アクチュエータ部内の圧力を上昇させることで飛び移り座屈現象を発生させ,把持部を大きく開く.
・フォースクロージャではなくフォームクロージャによる把持のため,把持を維持する際に電力を必要としない.
・多様な形状,爪の本数に対応できるアクチュエータ部の特性から設計の自由度が高い.
[3]結果
・桃の把持を行い,平均値以上の重量の把持を実現した.
[4]参考文献
・論文: Hiroki Hanamori, Akihiro Kawamura, Ryo Kurazume: “Soft Gripper Using 3D Snap-Through Buckling for Perishable Fresh Fruits Handling 27th International Symposium on Artificial Life and Robotics (AROB 27th 2022), GS26-7, on-line, 2022.1.25-27, 2022
[5]担当者
九州大学 河村晃宏,花守拓樹 (kawamura@ait.kyushu-u.ac.jp, hanamori@irvs.ait.kushu-u.ac.jp)
 |
 |
|
|
グリッパの外観 |
設計のバリエーション |
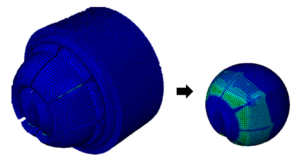
接触力の分散(FEM解析) |