SIP-PE3
SIP-PE3
摘まみ把持と突き刺し把持が可能なニードルグリッパ
[1]開発目的
課題
千切キャベツやパスタなどの食品を安定的に把持できるロボットエンドエフェクタがまだ少ない.また,検品の工程で食品トレイに既にパッケージングされた食品を取り除く必要があり,その際に食品の上面しかアプローチできないため,把持が難しい.
解決方法
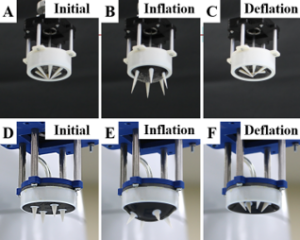
複数のニードルで食品に突き刺して把持するコンセプトを利用する.空気圧駆動柔軟膜にニードルを固定し,膜の膨らみでニードルの開閉を制御する.正圧と負圧の切り替えて,摘まみ把持と突き刺し把持の両方を実現する.
[2]構造
・硬い部分と柔らかい膜で空気チャンバーを形成し,膜の表面に複数のニードルを固定している.
・初期状態はニードルが斜めになり,グリッパの中心に集まっているようにする.
・グリッパの剛性を確保するために,ニードルの形状は根元が太く,先端が細くしている.
[3]結果
・千切キャベツ,刻みネギ,ひじき,パスタを用いて摘まみ把持の有効性を検証した.
・鮭塩焼き,ハンバーグ,コロッケ,ナゲット,メンチカツ,まぐろ竜田,白身魚フライを用いて突き刺し把持を確認した.
[4]参考情報
・論文1: Zhongkui Wang, Yui Makiyama, and Shinichi Hirai, A Soft Needle Gripper Capable of Grasping and Piercing for Handling Food Materials, Journal of Robotics and Mechatronics, 33(4): 935-943, Aug., 2021.
・論文2: Yui Makiyama, Zhongkui Wang, and Shinichi Hirai, A Pneumatic Needle Gripper for Handling Shredded Food Products, The 2020 IEEE Int. Conf. on Real-time Computing and Robotics, Sept. 28th-29th, 2020.
・ 特許: 立命館大学単独出願済
[5]担当者
立命館大学 王 忠奎,平井 慎一(wangzk@fc.ritsumei.ac.jp, hirai@se.ritsumei.ac.jp )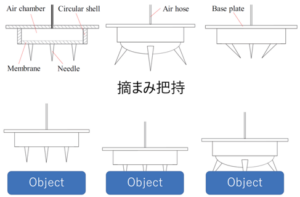 |
 |
|
グリッパプロトタイプ |
キュウリの把持様子 |
摘まみ把持と突き刺し把持の実現
摘まみ把持
摘まみ把持