SIP-PE1
SIP-PE1
平行シェルグリッパ
[1]開発目的
課題
複数の細長い食品や農作物の自動箱積み作業が需要があり,傷をつけずに自動箱詰めエンドエフェクタがまだ少ない.特に,農作物が重量があり,高速の運搬が難しい.
解決方法
硬いシェル部の表面に薄いシリコン膜を設け,空気圧を印加することで柔軟膜が膨らみ,対象物を把持できる.硬いシェルがあるため,低い空気圧で大きい把持力が実現でき,対象物に傷をつけずに安定的な把持ができる.
[2]構造
・グリッパ内部構造を工夫することで,液体シリコンを一回だけ流し込みことで,製作できる.
・内部を中空構造を設計することにより,液体シリコンが内蔵面の下に潜りこみことができ,空気圧を印加しても外れない.
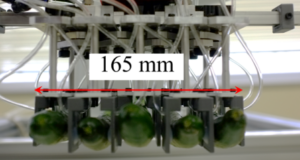
・複数対象物を同時に箱詰めする際に,密の状態で箱詰めできるように,グリッパを3mmまで薄く作ることができる.
[3]結果
・北海道選果場でキュウリの自動箱詰め実証実験を行った.
・9本キュウリの同時自動箱詰めが実現できた.
[4]参考情報
・論文1: Hiroki Aoyama, Zhongkui Wang, and Shinichi Hirai, “Shell Gripper Inspired by Human Finger Structure for Automatically Packaging Agricultural Product”, EEE-RAS Humanoids 2022, Okinawa, Japan, Nov. 28-30, 2022.
・論文2: Ryo Kanegae, Zhongkui Wang, and Shinichi Hirai, Easily Fabricatable Shell Gripper for Packaging Multiple Cucumbers Simultaneously, The 2020 IEEE Int. Conf. Real-time Computing and Robotics, Sept. 28th-29th, 2020.
・ YouTube: https://www.youtube.com/watch?v=cvN-aeHF_Pk
・ 特許: 立命館大学単独出願済
[5]担当者
立命館大学 王 忠奎,平井 慎一(wangzk@fc.ritsumei.ac.jp, hirai@se.ritsumei.ac.jp )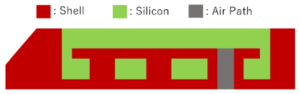 グリッパ断面図 |
 グリッパプロトタイプ |
 キュウリの把持様子 |
複数キュウリの自動箱詰めの実現