SIP-PF4
SIP-PF4
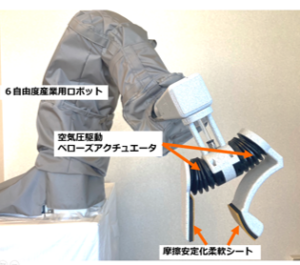
高速食器把持用ベローズアクチュエータグリッパ
[1]開発目的
課題
ロボットや環境に幾何誤差が存在する場合や高速運動時の軌道追従誤差などが予想される場合には,グリッパと対象物/環境への予期せぬ機械的接触(衝突)が発生する.このような状況においても,対象物や環境に損傷をあたえず,ロバストに把持を実現する必要がある.従来の金属製グリッパでは,すべての方向の外力に対する柔軟性を保証できない.また,高分子材料の空気圧駆動柔軟指では,全体が柔軟となり振動問題が大きくなる.
解決方法
グリッパの指部は剛体で構成し,柔軟性を有するベローズアクチュエータを介してロボットと連結する.これによって,剛体のグリッパの指部が対象物や環境と接触した場合も破損を回避する.
[2]構造
・負圧駆動とする.把持時はベローズは収縮して把持力を発生する.
・ベローズが収縮するので,ベローズの剛性は増加して,振動抑制効果がある.
・ベローズアクチュエータを2個独立に制御可能として,各指を制御する.
・一方の指に吸着バッドを搭載して,食器底部を吸着する場合に利用できる.
[3]結果
・プラスティック製の薄皿,小鉢,茶碗など高速把持を達成した.
・薄皿を把持する場合は,トレイと指先を最初に接触させ,指先を皿の下に移動後に把持した.
[4]参考情報
・論文: 未発表
・ YouTube: 未公表
・ 特許: 出願済み
[5]担当者
立命館大学 森 佳樹,王 忠奎,川村 貞夫(wangzk@fc.ritsumei.ac.jp, kawamura@se.ritsumei.ac.jp)

大規模食堂の食器回収作業