SIP-PF2
SIP-PF2
可変剛性機能を有する空気圧駆動柔軟指
[1]開発目的
課題
柔軟指では柔軟性を利用して様々な形状の対象物を把持できる.しかし,対象物を高速に搬送する際に柔軟性から振動が問題となる.把持力を大きくすると剛性が高まる場合もあるが,対象物の表面や内部が破損する問題が発生する
解決方法
把持力は増加させずに,指の剛性のみを増加させ,振動を抑制する.
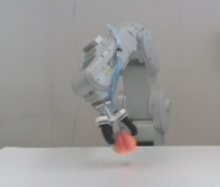
[2]構造
・柔軟指は空気圧により屈曲して把持力を発生する.
・高分子材料シートを積層した要素を指に内包して,負圧によりシート同士を接触させて剛性を高める.
・積層シート部を大気圧にもどすと剛性は低下し,可変剛性となる.
・複雑な構造体は3Dプリンタによって制作した.
[3]結果
・把持力を増加させず,指の剛性のみ変化を実現した.
・脆弱な対象物を把持して,高速運動時にも落下させず,ピックアンドプレイス作業を実験室で実現した.
想定対象物
・ももなどの表面が脆弱な農林水産物,食品などの対象物の高速ハンドリングを想定している.
[4]参考情報
・Mingzhu Zhu, Mori Yoshiki, Tatsuhiro Wakayama, Akira Wada and Sadao Kawamura, “A Fully Multi-Material Three-Dimensional Printed Soft Gripper with Variable Stiffness for Robust Grasping”, Soft Robotics, Vol.6, No.4, 2019 DOI:10.1089/soro.2018.0112
・YouTube (可能な限り加える)
・特許 現在は保有していない(特許申請などの状況を示す)
[5]担当者
立命館大学 森 佳樹 川村貞夫 (連絡先は個別判断で記載の有無を決める) |
 |
|
多様な形状物の把持可能 |
通常の柔軟指の場合 高速ハンドリングで対象物が落下 |
柔軟指の剛体化による高速ハンドリングの実現
With using jamming layer
Without using jamming layer