SIP-EM2
[1]開発目的
課題
柔かくて滑りやすい食品や水産物の把持が困難である.また,薄くて滑りやすい食品の把持も難しい.摩擦のでで把持不可能な食品や農林水産物を把持可能なエンドエフェクタがまだ少ない.
解決方法
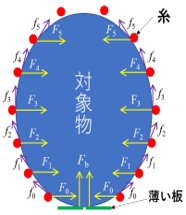
摩擦力に依存せず,対象物の下に潜りこんで下から対象物を掬い込むのは本提案である.また,高速運動をする際に把持を安定させるために,対象物の側面にも柔軟性が拘束を入れる.そうすることで,対象物の上下,左右,前後の方向から把持するようになり,柔軟かつ滑りやすくても安定的に把持できる.
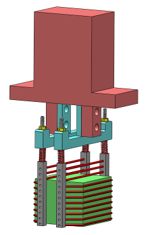
[2]構造
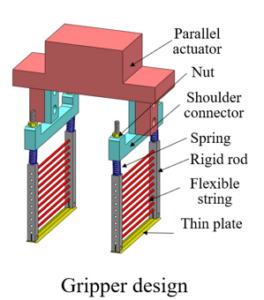
・グリッパが1つの平行開閉グリッパと二つの掬い込み機構で構成されている.
・掬い込み機構は下の薄い板と複数の伸縮性がある糸で構成されている.
・地面との衝突を吸収するために掬い込み機構にばねを入れており,上下運動の自由度がある.
[3]結果
・摩擦係数が非常に低いゲルサンプル(ゲルクラゲ)を水槽から取り出す実験を行った.
・様々な食品の把持実験を行った.脆弱物,滑りやすい食品,水産物などが把持成功した.
[4]参考情報
・論文: Zhongkui Wang, Haruki Furuta, Shinichi Hirai, Sadao Kawamura, A scooping-binding robotic gripper for handling various food products, Frontiers in Robotics and AI: Soft Robotics, 8:640805, 2021.
・ 特許: 立命館大学単独出願済
[5]担当者
立命館大学 王忠奎,平井慎一,川村貞夫(wangzk@fc.ritsumei.ac.jp, hirai@se.ritsumei.ac.jp, kawamura@se.ritsumei.ac.jp)
 |
  |
|
グリッパの構造 |
把持原理 |
ゲルサンプルの把持実験
ゲルクラゲのサンプル
ゲルクラゲの水槽から取り出し実験
様々食品の把持実験