SIP-EF3
低摩擦モータ駆動グリッパ
[1]開発目的
課題
電動モータ駆動では,バックラッシュを小さくして高精度化し,小型モータに高減速比ギアなどを利用するために,摩擦が大きくなる.このようなモータユニットをエンドエフェクタに利用すると,機械的接触に対してのバックドライバビリティは著しく低下して,安全にテーブルへ接触するなどが困難となる.DDモータやセンサフィードバック制御による解決法も提案されているものの,重量,価格,保守などの課題も残っている.
解決方法
センサを利用せず小型の低摩擦モータ駆動ユニットを利用する.グリッパの各指にモータユニットを直接に接続して,回転系として接触時の反力をモータの回転方向成分として受ける.
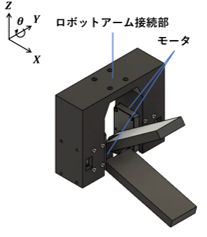
[2]構造
・低摩擦モータユニットにCFRP製の指を取り付け,2個のモータによって1対のグリッパを構成する.
・2個のモータの回転中心は一致させ,ピッチ角は鉛直軸から±140deg程度実現した.
・テーブルなどへの接触時には,各指を鉛直軸から± 30deg以上開いた角度で接触して,接触時の反力をモータの回転成分として,反力の増大を抑制する.
・吸着パッドを一方の指部に装着してグリッパで把持困難な平面状対象物を吸着する.
[3]結果
・陶器の食器を把持して回収することが可能となった.
・下膳作業に利用して,布,紙,箸などテーブルに置かれて薄い対象物の把持に成功した.
[4]参考情報
・松野君の発表
・ 特許: 立命館大学単独出願済
[5]担当者
立命館大学 加古川 篤,川村貞夫(kakogawa@fc.ritsumei.ac.jp, kawamura@se.ritsumei.ac.jp)