SIP-PF3
SIP-PF3
脆弱食品高速把持用ショベルグリッパ
[1]開発目的
課題
脆弱かつ滑りやすい食品や水産物の高速把持が困難である.従来のソフトグリッパの材質が硬く,対象物との接触は点接触や線接触であり,対象物の把持と運搬は摩擦力を依存している.結果として,高速での把持と運搬が難しい.
解決方法
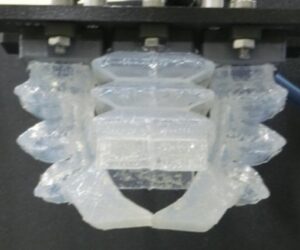
グリッパの構造を工夫することで,脆弱かつ滑りやすい食品の高速把持を可能にする.柔軟指の先端にショベルの形状にし,把持する際に接触面積を増やし,対象物の下に潜って,下から対象物の重量を支える.さらに,スリッパの真ん中にベローズ構造の抑え部を設け,上から対象物を抑えて,高速把持を安定させる.
[2]構造
・柔軟指と抑え部は空気駆動のベローズ構造をゆうする.
・柔軟指の先端にショベルの形状を取り,幅を大きくする.3Dプリンタで製作のため,適切な角度で設計する.
・柔軟指の剛性をあげるため,根元部の厚みを先端より厚くしており,先端のショベル部を空洞にする.
[3]結果
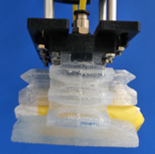
・パン粉が付いている生牡蠣(冷凍する前のカキフライ)で実証実験を行った.
・高速トレイ入れ実験により,タクトの80個/分を実現できた.
[4]参考情報
・論文: 未発表
・ YouTube: 未公表
・ 特許: 2023年1月出願予定
[5]担当者
立命館大学 王忠奎,川村貞夫(wangzk@fc.ritsumei.ac.jp, kawamura@se.ritsumei.ac.jp) |
 |
  |
|
グリッパ初期状態 |
グリッパ閉じた状態 |
対象物の把持様子 |
カキフライの高速把持の実現(タクト:80個/分)