SIP-PF1
細断食品把持用包み込みグリッパ
[1]開発目的
課題
細断食品の把持と弁当への盛り付け作業の自動化需要があり,定量的に把持できる柔軟エンドエフェクタが少ない.細断食品が細かくて,粒のサイズが小さいため,こぼれずに把持するのは困難であり,食品に傷をつけないため,エンドエフェクタに柔軟性を求められている.
解決方法
柔軟な高分子材料で製作でき,空気圧を印加すると,包み込むように細断食品を把持するエンドエフェクタを提案した.
[2]構造
・閉じるときに,エンドエフェクタの先端に隙間が残らないために,柔軟指の形状を三角形のようにする.
・縦と横向きの空気チャンバーの複数を設け,空気圧を印加することで包み込む動作をする.
・柔らかいシリコンゴムを用いて,型成形で製作する.
[3]結果
・刻みネギ,コーン,ひじき,塩の把持を実現した.
・刻みネギの定量把持を確認できた(相対標準偏差が12%以内).
[4]参考情報
・論文: Yoshiyuki Kuriyama, Yuusuke Okino, Zhongkui Wang, and Shinichi Hirai, “A Wrapping Gripper for Packaging Chopped and Granular Food Materials”, 2019 IEEE Int. Conf. on Soft Robotics (RoboSoft 2019), COEX, Seoul, Korea, Apr. 14-18, 2019. DOI: 10.1109/ROBOSOFT.2019.8722745
・ YouTube: https://www.youtube.com/watch?v=OKZYi9q7Zcw
・ 特許: NIPPN社と共同出願済
[5]担当者
立命館大学 王忠奎,平井慎一 (wangzk@fc.ritsumei.ac.jp, hirai@se.ritsumei.ac.jp)
 |
 |
 |
| グリッパ初期状態 | グリッパ閉じた状態 | コーンの把持 |
刻みネギの定量把持の実現
把持実験動画
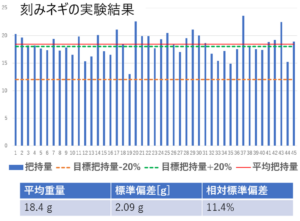
45回連続把持重量の結果